E-Wear Confernce @ Stanford
Zhenan Bao (Chemical Engineering) - Self Healing Stretchable Artificial Skin
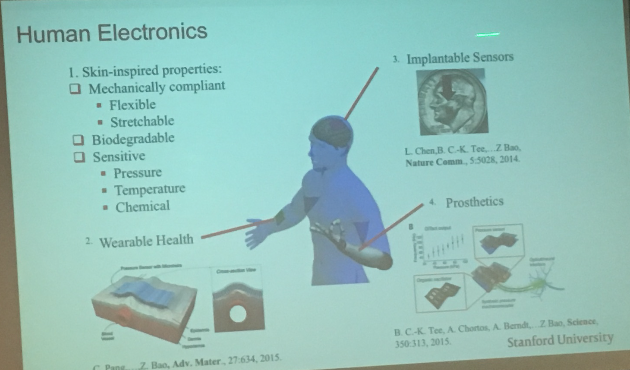
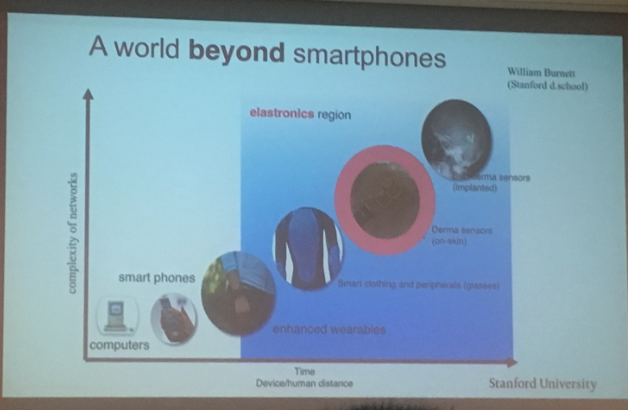 A world beyond smartphones: Back in the time we had desktops, then smartphones came alone, and now is the era of smart clothing and peripherals (i.e., smart watches and smart glasses) and then is going to be era of Derma sensors on the skin, and eventually we will hit the era of sensors implants.
A world beyond smartphones: Back in the time we had desktops, then smartphones came alone, and now is the era of smart clothing and peripherals (i.e., smart watches and smart glasses) and then is going to be era of Derma sensors on the skin, and eventually we will hit the era of sensors implants.
Three major publications presented:
25th Anniversary Article: The Evolution of Electronic Skin (E-Skin): A Brief History, Design Considerations, and Recent Progress - Hammock et al. 2013
Electronic skin (e-skin) be further improved through the incorporation of additional functionalities (e.g., chemical and biological sensing) and desired properties (e.g., biodegradability and self-powering). Continued rapid progress in this area is promising for the development of a fully integrated e-skin in the near future.
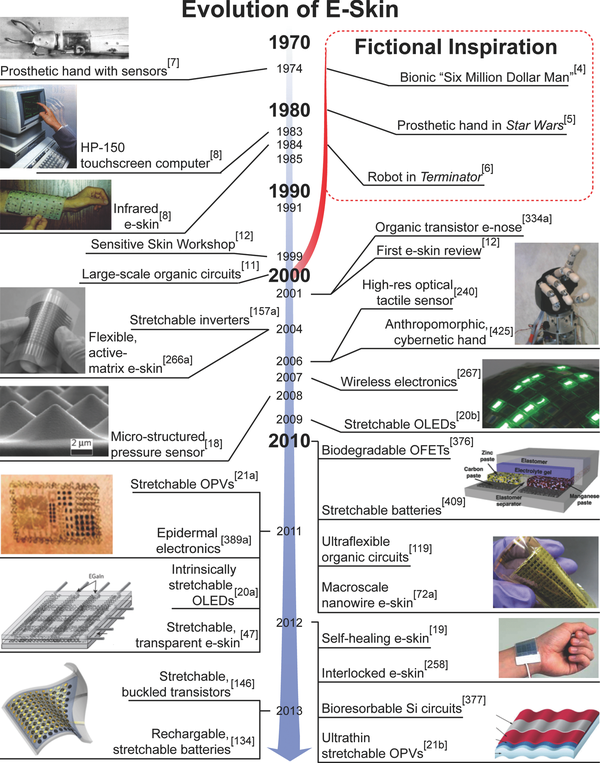 A brief chronology of the evolution of e-skin. We emphasize several science fictional events in popular culture that inspired subsequent critical technological advancements in the development of e-skin. Images reproduced with permission: “micro-structured pressure sensor,”[18] “stretchable OLEDs,”[20b] “stretchable OPVs,”[21a] “stretchable, transparent e-skin,”[22] “macroscale nanowire e-skin,”[23a] “rechargeable, stretchable batteries,”[137] “interlocked e-skin.”[25] Copyright, respectively, 2010, 2009, 2012, 2005, 2010, 2013, 2012. Macmillan Publishers Ltd. “Flexible, active-matrix e-skin”[26a]. National Academy of Sciences USA. “Epidermal electronics” [390a]. “Stretchable batteries” [27]. “Infrared e-skin”.[8b] “Anthropomorphic cybernetic hand” [426]
A brief chronology of the evolution of e-skin. We emphasize several science fictional events in popular culture that inspired subsequent critical technological advancements in the development of e-skin. Images reproduced with permission: “micro-structured pressure sensor,”[18] “stretchable OLEDs,”[20b] “stretchable OPVs,”[21a] “stretchable, transparent e-skin,”[22] “macroscale nanowire e-skin,”[23a] “rechargeable, stretchable batteries,”[137] “interlocked e-skin.”[25] Copyright, respectively, 2010, 2009, 2012, 2005, 2010, 2013, 2012. Macmillan Publishers Ltd. “Flexible, active-matrix e-skin”[26a]. National Academy of Sciences USA. “Epidermal electronics” [390a]. “Stretchable batteries” [27]. “Infrared e-skin”.[8b] “Anthropomorphic cybernetic hand” [426]
 Flexible pressure sensors are essential parts of an electronic skin to allow future biomedical prostheses and robots to naturally interact with humans and the environment. In this paper fabrication of flexible pressure-sensitive organic thin film transistors with a maximum sensitivity of 8.4 kPa−1, a fast response time of <10 ms, high stability over >15,000 cycles and a low power consumption of <1 mW are presented.
Flexible pressure sensors are essential parts of an electronic skin to allow future biomedical prostheses and robots to naturally interact with humans and the environment. In this paper fabrication of flexible pressure-sensitive organic thin film transistors with a maximum sensitivity of 8.4 kPa−1, a fast response time of <10 ms, high stability over >15,000 cycles and a low power consumption of <1 mW are presented.
A Skin-inspired Organic Digital Mechanoreceptors - Science 2016
Sensing the force digitally
Our skin provides us with a flexible waterproof barrier, but it also contains a sensor array that feels the world around us. This array provides feedback and helps us to avoid a hot object or increase the strength of our grip on an object that may be slipping away. Tee et al.describe an approach to simulate the mechanoreceptors of human skin, using pressure-sensitive foils and printed ring oscillators (see the Perspective by Anikeeva and Koppes). The sensor successfully converted pressure into a digital response in a pressure range comparable to that found in a human grip.
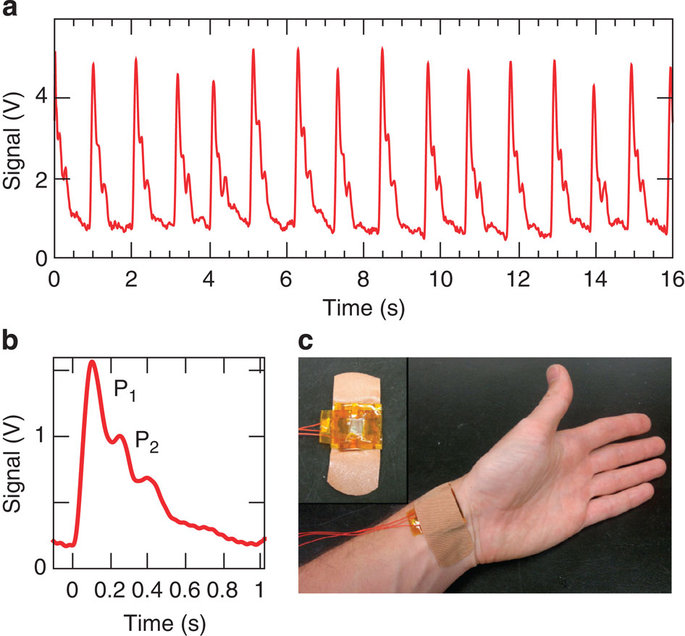
 Artificial skin is made out of stretchable material that doesn't cause irritation and are insensitive to strain. For example in a pulse wave monitoring study, the skin movements didn't negatively affect the measured pulses.
Artificial skin is made out of stretchable material that doesn't cause irritation and are insensitive to strain. For example in a pulse wave monitoring study, the skin movements didn't negatively affect the measured pulses.
Material: flexible, stretchable, biodegradable, self healing (damage resistance)
Sensing Functions: Touch, temperature, humidity, chemical
There are two approaches toward flexible, stretchable electronics:
- Materials typically used in electronic devices, e.g., silicon and metals, are rigid. Meandering and buckled designs features can make them more flexible but there is always a limit.
- Alternatively, intrinsically stretchable organic materials can be used, e.g., Polymer and carbon nano materials.
David Camarillo (Bioengineering) - Sports Wearables to Detect and Measure Concussion
dramatic brain inquiry —> neurogenetic diseases —> parkinson and alzheimer
Commercial concussion detector wearables are placed in three major locations: 1. most of them are  mounted on the head gear to capture and monitor what happens in the brain. But the movements of players during a football game is much more than the degree that one can imagine. Therefore a lot of false alarm is inevitable. Then the sensors were moved behind the ear on the skin. However skin elasticity and neck movements can cause a lot of false alarm as well. Later on, the sensors were moved to mounted inside the mouth gears of the players. The location of the sensors will be between upper and lower molars. Again, as humans are pretty unpredictable, portability aspect of the mouth gear, i.e., playing with it, may cause false alarms. Camarillo's students decided to place the sensors behind the upper central teeth to reduce the liberation. They observed a significant improvements with false alarms. Yet, collision severity measurement remained a challenging problem. for now. First, 1 millisecond sampling rate of the sensor did not suffice. Second, validation of the wearable usage in the field, using manual video data classification is not scalable. 10 hours of analysis of 1 hour game video was resulted to identify severe collisions manually.
mounted on the head gear to capture and monitor what happens in the brain. But the movements of players during a football game is much more than the degree that one can imagine. Therefore a lot of false alarm is inevitable. Then the sensors were moved behind the ear on the skin. However skin elasticity and neck movements can cause a lot of false alarm as well. Later on, the sensors were moved to mounted inside the mouth gears of the players. The location of the sensors will be between upper and lower molars. Again, as humans are pretty unpredictable, portability aspect of the mouth gear, i.e., playing with it, may cause false alarms. Camarillo's students decided to place the sensors behind the upper central teeth to reduce the liberation. They observed a significant improvements with false alarms. Yet, collision severity measurement remained a challenging problem. for now. First, 1 millisecond sampling rate of the sensor did not suffice. Second, validation of the wearable usage in the field, using manual video data classification is not scalable. 10 hours of analysis of 1 hour game video was resulted to identify severe collisions manually.
Allison Okamura (Mechanical Engineering) - Wearable Haptics for Human-robot Interaction and Virtual Reality
The word haptics, believed to be derived from Greek word haptesthai, means related to the sense of touch.
One side of Haptics is Kinesthesia which means knowing where your body is in 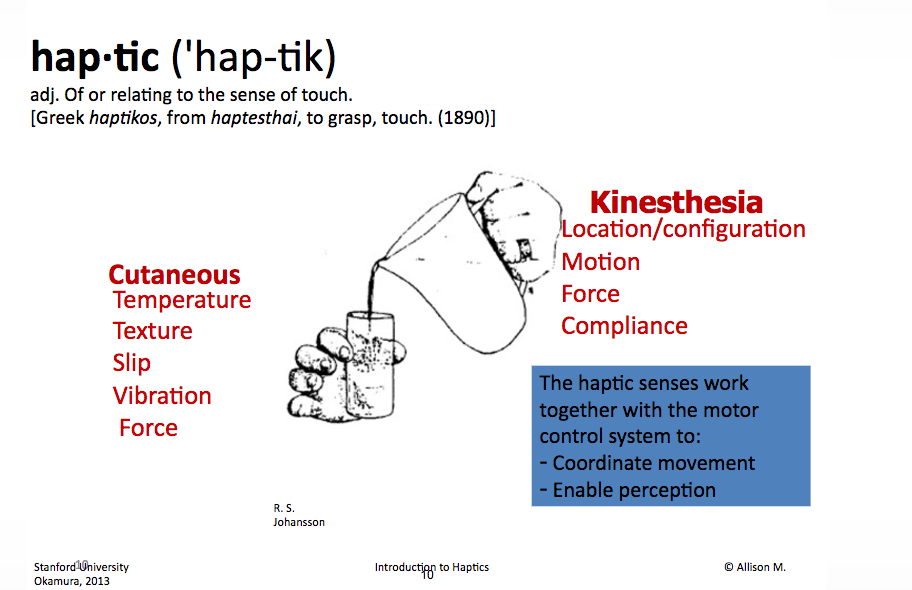 space, motion, force, location, and interacting with objects. It can give you information about the mechanical properties of an environment.
space, motion, force, location, and interacting with objects. It can give you information about the mechanical properties of an environment.
There is another side of haptics which has to do with skin. This is the Cutaneous side of haptics. It includes, temperature, high frequency information, texture, etc. It can also give information about the environment.
It is the integration of these two sides of haptic and integration with human motor which lets us move our body around (coordinating movement) and enables us with a perception (big picture around us).
In the psychology and neuroscience literature, haptics is the study of human touch sensing, specifically via Kinesthetic (force/positional) and cutaneous (tactile) receptors, associate with perception and manipulation.
Haptic wearable focus: light-weight wearable device that produces interpretable haptic effects.
sight vs. haptic
distributed centralized
broad and passive very limited and narrow
cognitive there is some cognitive aspect to it but there are a lot of physical. For example the knee reflex.
side note on difference between sight and touch processing by brain hemispheres. If an object is located on the right side of your eye, it is going to be processed by the Left hemisphere (link).

There are various ways to make the haptic sensation interpretable.
Skin deformation: remove the Kinesthesia so the human will only experience cutaneous sensation. So no feeling of force pushing back will be experienced. Still the haptic feedback allows an individual to manipulate correctly in a virtual environment and still it feels very natural.
 Haptic Jamming is a technique to create a dynamic tangible interface. Haptic jamming uses a combination of particle jamming and pneumatics to create a tactile display with simultaneously controllable stiffness and deformable geometry. The exact sequence of cell jamming, node pinning, and chamber pressurization that results in a desired surface configuration is studied using a a 12-cell prototype from a depth camera and a simulation algorithm.
Haptic Jamming is a technique to create a dynamic tangible interface. Haptic jamming uses a combination of particle jamming and pneumatics to create a tactile display with simultaneously controllable stiffness and deformable geometry. The exact sequence of cell jamming, node pinning, and chamber pressurization that results in a desired surface configuration is studied using a a 12-cell prototype from a depth camera and a simulation algorithm.
Paper: Deformable Model-Based Methods for Shape Control of a Haptic Jamming Surface - IEEE2017
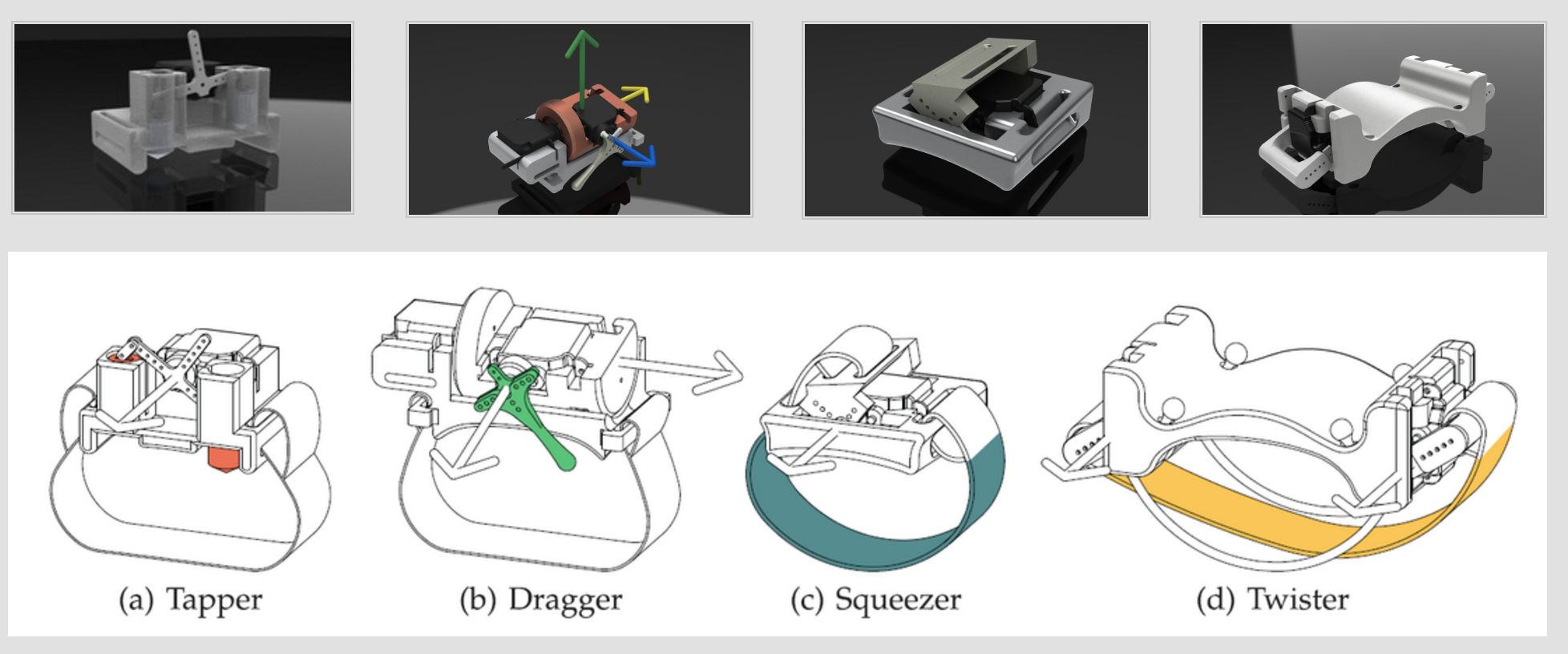
How do we do the skin deformation to allow feeling of picking up a mess without picking up the weight? Giving a haptic delusion. We are decrementing the force. Shear direction is also needed to feel the sense of direction.
paper: Sensory Substitution using 3-Degree-of-Freedom Tangential and Normal Skin Deformation Feedback - IEEE
 Conclusions (from the paper): Our results show that subjects have the best performance using 3-DoF force feedback, followed by 1-DoF force feedback, 3-DoF skin deformation feedback, and 1-DoF skin deformation feedback. The better performance of 3-DoF compared to 1-DoF feedback is due to the lateral force cues that guide users towards the hole center, while the better performance of force feedback compared to skin deformation feedback can be attributed to the physical constraint in the direction normal to the surface, allowing user to explore the surface with greater ease and to locate the hole center faster and more accurately.
Conclusions (from the paper): Our results show that subjects have the best performance using 3-DoF force feedback, followed by 1-DoF force feedback, 3-DoF skin deformation feedback, and 1-DoF skin deformation feedback. The better performance of 3-DoF compared to 1-DoF feedback is due to the lateral force cues that guide users towards the hole center, while the better performance of force feedback compared to skin deformation feedback can be attributed to the physical constraint in the direction normal to the surface, allowing user to explore the surface with greater ease and to locate the hole center faster and more accurately.
 Paper: HAPI Bands: A Haptic Augmented Posture Interface. In IEEE 2012
Paper: HAPI Bands: A Haptic Augmented Posture Interface. In IEEE 2012
The body-worn component of the HAPI Bands system is a set of five bands used for both sensing arm orientation and providing localized vibrotactile feedback to correct pose in joint space. The waist band provides feedback to stabilize the body’s core, and bands on the arms deliver vibrotactile cues to the shoulder and elbow joints.
Paper: Modeling and Design of Asymmetric Vibrations to Induce Ungrounded Pulling Sensation Through Asymmetric Skin Displacement - IEEE2016
Asymmetric vibration: hit the user hard in on direction and slowly. These are very good for guiding users in different directions.
paper abstract: We design a system with voicecoil actuators that are driven with stepramp current pulses to create asymmetric 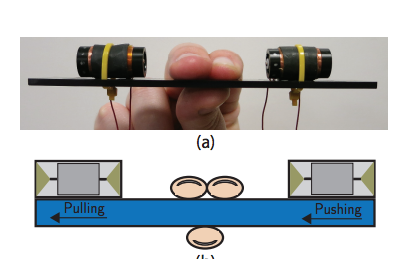 accelerations. When the voicecoils are attached to a handle, the force pulses are translated to skin displacement at the user’s fingertips. This skin displacement, which is asymmetric in both amplitude and speed, is perceived as a directional pulling force, rather than as a vibration. Our analysis shows that the frequency and pulse width of the actuator inputs are important in creating effective skin displacement profiles. Both the amplitude and speed of skin displacement should be maximized in the desired direction, and minimized in the opposite direction
accelerations. When the voicecoils are attached to a handle, the force pulses are translated to skin displacement at the user’s fingertips. This skin displacement, which is asymmetric in both amplitude and speed, is perceived as a directional pulling force, rather than as a vibration. Our analysis shows that the frequency and pulse width of the actuator inputs are important in creating effective skin displacement profiles. Both the amplitude and speed of skin displacement should be maximized in the desired direction, and minimized in the opposite direction
lab http://charm.stanford.edu/Main/Publications
Ada Poon (Electrical Engineering) -Rechargeable Soft Electronics for Wearable Wireless Applications
Optogenetics - controlling a brain
Optogenetics enables neuroscientists to turn brain cells on and off with pulses of light. But until now there’s been an obvious difficulty: How do you deliver that light to brain cells that are tucked inside an animal’s skull?
a tiny, wireless LED device that can be fully implanted beneath the skin of a mouse now allows for this control. The device lets researchers turn on the light and stimulate neurons when the mouse is scampering around, behaving more or less normally. This system is fully wireless which is a big advantage compared to previous methods that involved bulky wirings.
They observe signifiant change in heart rate (bpm) and blood pressure.
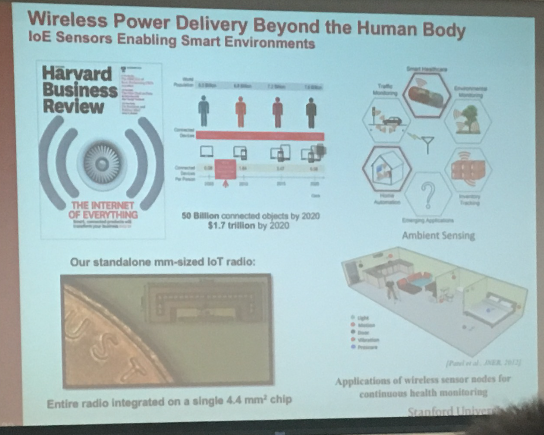
Amin Arbabian (Electrical Engineering), Wireless Powering and Communication